



4. Аналитическая геометрия в трехмерном пространстве
4.1 Системы координат в трехмерном пространстве
В данном разделе мы представим основные объекты аналитической геометрии в трехмерном пространстве. Прежде всего введем наиболее часто используемые системы координат. Фиксируем одну из точек пространства $O$, назовем ее началом координат. Выпустим из этой точки 3 взаимно-ортогональные оси (или, что то же самое, выберем тройку взаимно ортогональных векторов, направляющих этих осей). Координаты точки $M$, числа $x, \, y, \, z$ , определяются как проекции отрезка $OM$ на оси. С векторной точки зрения эти числа - координаты вектора $OM$. Точке $M$ сопоставим тройку чисел $(x,y, z)$, это сопоставление и есть декартова система координат на плоскости (см. рис. 11).
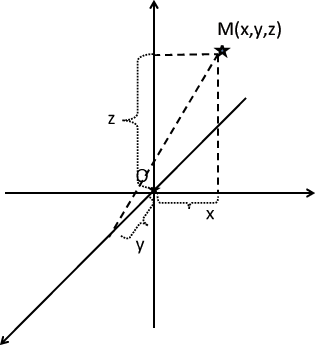
Рис 11: Декартова система координат в трехмерном пространстве.
Еще одна часто используемая система координат в трехмерном пространстве - цилиндрическая. Она применяется, если в рассматриваемой задаче есть осевая симметрия (при этом ось симметрии назначается осью $z$). Положим ее начало координат совпадающим с точкой $O$, ось $z$ совместим с осью $z$ декартовой системы координат, а в плоскости $(x,y)$ введем полярную систему координат, сопоставляя проекции текущей точки $M$ ее полярные координаты $(\rho, \varphi)$. Обычно полярную ось совмещают с положительным направлением оси $x$ декартовой системы координат, см. рис. 12.
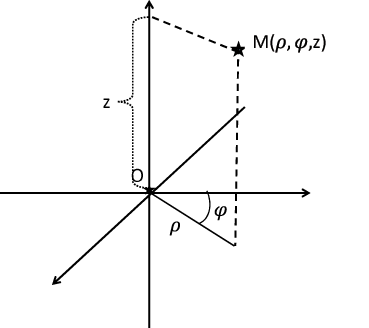
Рис 12: Цилиндрическая система координат в трехмерном пространстве.
В этом случае легко написать формулы, связывающие цилиндрические координаты с декартовыми, \[ x=\rho \cos \varphi, \quad y=\rho \sin \varphi, \quad z=z. \] При этом координаты принимают значения в следующих пределах: $z \in (-\infty, \, +\infty)$, $\rho \in \left [0, \, \infty \right)$, $\varphi \in \left [0, \, 2\pi \right)$. Еще одна часто используемая система координат в трехмерном пространстве - сферическая, применяется, если в задаче есть симметрия при поворотах относительно фиксированной точки. Эту точку назначают началом координат, и фиксируют одну ось (ее обычно совмещают с осью $z$ декартовой системы координат). Угол между этой осью и вектором $OM$ обозначают $\theta$, длину вектора $OM$ обозначают $\rho$. Затем в плоскости, перпендикулярной оси, фиксируют направление (обычно его совмещают с положительным направлением оси $x$ ) и угол между эти направлением и плоскостью, проходящей через ось $z$ и вектор $OM$, обозначают $\varphi $, см. рис. 13.
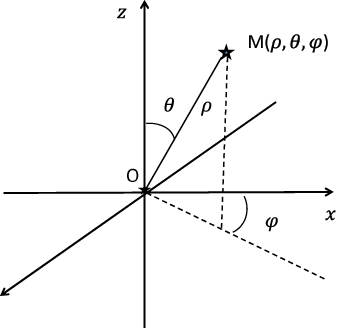
Рис 13: Сферическая система координат в трехмерном пространстве.
Нетрудно выписать связь с декартовыми координатами в принятых выше предположениях. Имеем: \[ x=\rho \sin \theta \cos \varphi, \quad y=\rho \sin \theta \sin \varphi, \quad z=\rho \cos \theta . \] В принятой параметризации координаты принимают значения в следующих интервалах: $\rho \in \left[ 0, \, \infty\right)$, $\theta \in \left[ 0, \, \pi \right]$, $\varphi \in \left[ 0, \, 2\pi \right)$.